
Here is a PID based line following robot. When designing line following robots my first attempt was to build a robot which moves extremely smoothly along a line. To get a really smooth over a line you need to build up a PID algorithm unless with other techniques you cannot happy with the robots movement.
I have developed this robot to follow lines from 0.75" inches, 1" Inch, 1.5" Inches & 2" inches track sizes. The original design consists with following features.
PID line following robot features
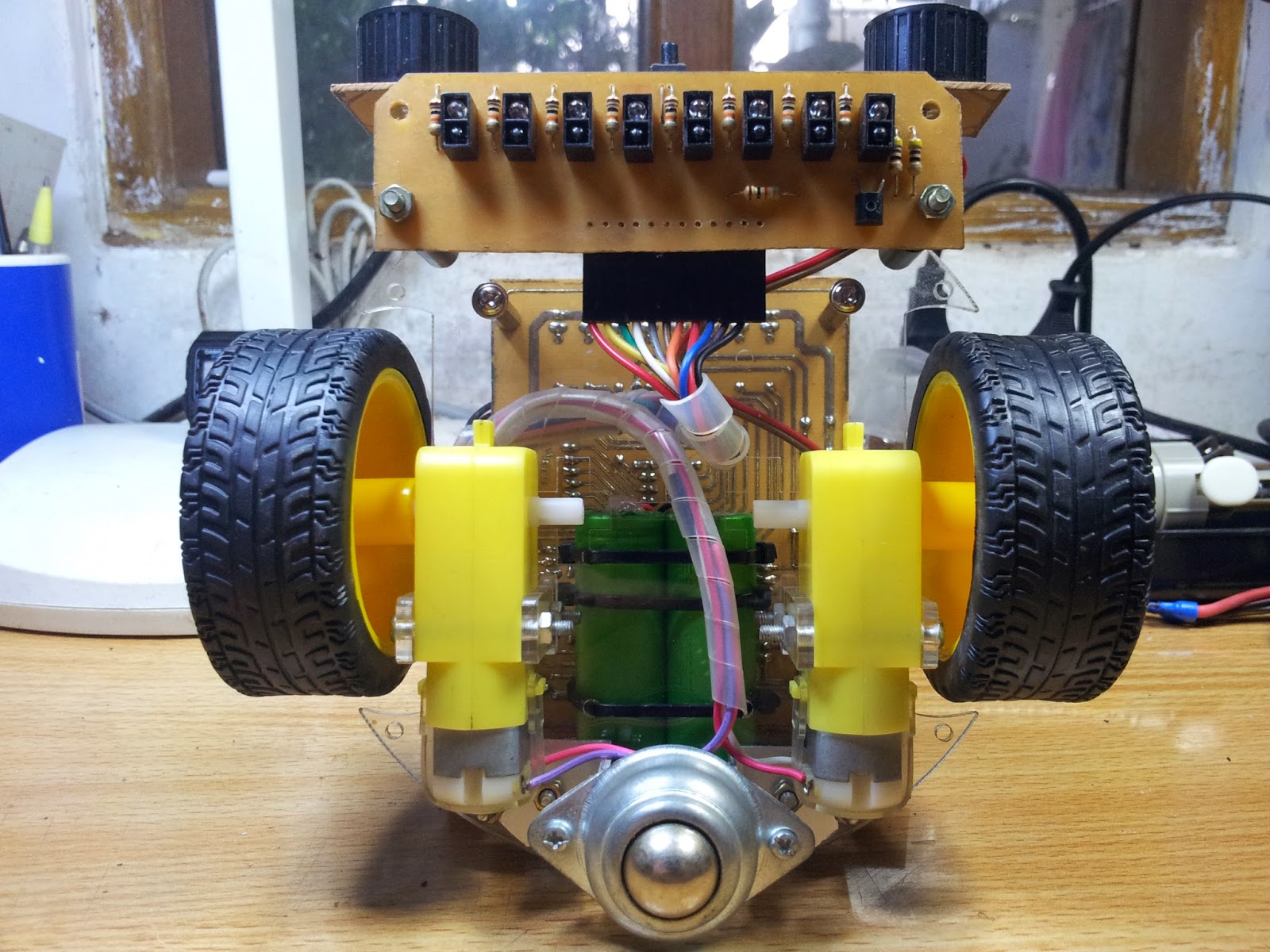
* 8 sensors array to get precision track follow
* Adjustable kp, ki, kd parameters (values range from 1 to2 55)
* Adjustable robot speed (1 to 255)
* Adjustable sensor count for different track widths
* Selectable line colour (Black line or white line)
* Dedicated LED indicators to show the position of robot
* User friendly push buttons for program the robot (without using a PC)
* Head lamps with strobe effect & selectable patterns with memory
All the fine tunings are done by the two push buttons (Mode switch & Adjust switch) without using a personal computer. After programming the parameters, those values will be saved inside the memory of the microcontroller. So you don’t have to program when next time power up.
This is a specially designed robot for a competition so the free source codes features are limited. You have to change the kp, ki, kd parameters manually & program the microcontroller & test the robots behavior. But the accuracy and the smoothness is same as in my original design.


I have developed this robot to follow lines from 0.75" inches, 1" Inch, 1.5" Inches & 2" inches track sizes. The original design consists with following features.
PID line following robot features
* 8 sensors array to get precision track follow
* Adjustable kp, ki, kd parameters (values range from 1 to2 55)
* Adjustable robot speed (1 to 255)
* Adjustable sensor count for different track widths
* Selectable line colour (Black line or white line)
* Dedicated LED indicators to show the position of robot
* User friendly push buttons for program the robot (without using a PC)
* Head lamps with strobe effect & selectable patterns with memory
All the fine tunings are done by the two push buttons (Mode switch & Adjust switch) without using a personal computer. After programming the parameters, those values will be saved inside the memory of the microcontroller. So you don’t have to program when next time power up.






No comments:
Post a Comment